Attempting to load ROSCon Archive Listings.

Registration
In a first for ROSCon, we are sold out! Due to the capacity limit of the venue, we will not be able to accommodate any more attendees. We will not be offering on-site registration.
Live Streaming

We’ll live-stream the ROSCon presentations online, free of charge:
If you’d like to discuss it online there is a Slack Channel which we will try to monitor at the event. If you don’t have a rosorg Slack account you can register here
And if you’re using social media please use #ROSCon2015.
We’re able to offer this benefit to the community thanks to generous sponsorship from our friends at Qualcomm. So if you can’t join us in person in Hamburg, you can follow along online. We will also be recording the presentations and posting them afterward, as we’ve always done.
ROSCon 2015
ROSCon 2015 is a chance for ROS developers of all levels, beginner to expert, to spend an extraordinary two days learning from and networking with the ROS community. Get tips and tricks from experts and meet and share ideas with fellow developers from around the globe.
ROSCon is a developers conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota, the second version in Stuttgart, Germany, last years event in Chicago, Illinois, this year’s ROSCon will be held in Hamburg, Germany. Similar to previous years, the two-day program will comprise technical talks and tutorials that will introduce you to new tools and libraries, as well as teach you more about the ones you already know. The bulk of the program will be 30-40 minute presentations (some may be longer or shorter). To submit a proposal please read the Call for Proposals.
If you don’t want to make a formal presentation, you should still bring your new project or idea to ROSCon! There will be sessions of Lightning Talks, which are 5-minute mini-talks that are scheduled just-in-time at the conference. There will also be open space for Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and informal presentations.
If you are looking for information on past ROSCons see their separate websites including past programs, slides and videos of the presentations are available from their programs: ROSCon 2012 Program, ROSCon 2013 Program, and ROSCon 2014 Program.
As more information becomes available this years program will be filled out here.
Dates
Important dates to keep in mind for ROSCon 2015.
Call for Proposals circulated
May 15th, 2015
Proposal submission deadline
July 7th, 2015
Proposal acceptance notification
July 14th, 2015
Early registration deadline
August 31st, 2015
ROSCon 2015 in Hamburg Germany
October 3rd-4th, 2015
Sponsors
We couldn’t put on ROSCon without the generous support of our sponsors. If you’d like to know more about them, please find them at the event.
Platinum Sponsors |
|||||
 |
|||||
Gold Sponsors |
|||||
 |
 |
 |
|||
 |
 |
||||
|
 |
 |
|||
 |
|||||
 |
 |
||||
Silver Sponsors |
|||||
 |
|||||
If you are interested in finding out more about sponsoring ROSCon please contact the organizing committee. Or view our sponsor prospectus.
Location
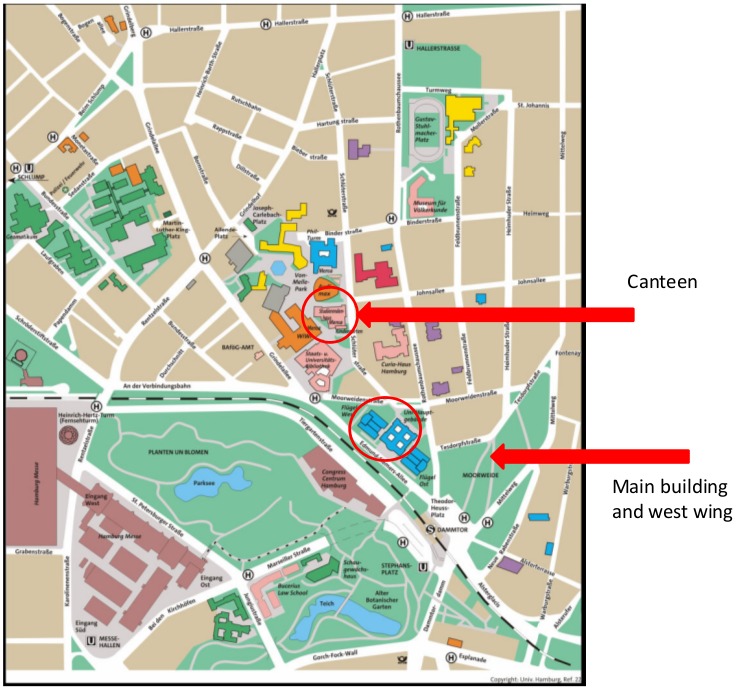
ROSCon will be held at the University of Hamburg.
The buildings for the main event and lunch can be found in the map below.
Nearby Hotels
There are many options near the venue where you might stay. Here are links to a few near the venue.
Hotels
| Hotel Am Dammtor Hamburg |
Schlüterstraße 2 20146 Hamburg Germany |
| Grand Elysée Hamburg |
Rothenbaumchaussee 10 20148 Hamburg Germany |
| Radisson Blu Hamburg |
Marseiller Straße 2 20355 Hamburg Germany |
Boutique/B&B Style
| Hotel NH Hamburg Mitte |
Schäferkampsallee 49 20357 Hamburg Germany |
| Yo Ho The Young Hotel |
Moorkamp 5 20357 Hamburg Germany |
| Hotel Heimhude Hamburg |
Heimhuder Straße 16 20148 Hamburg Germany |
| Hotel am Museum |
Rothenbaumchaussee 71 20148 Hamburg Germany |
| Hotel Fresena |
Moorweidenstraße 34 20146 Hamburg Germany |
Invitation letters for visas
If you require an invitation from the conference organizers to obtain a visa to enter Germany, please email your request to the organizing committee. Please include your full name and mailing address (for inclusion in the letter; we’ll email you the signed letter).
Program
The Program for ROSCon 2015 is now available!
ROSCon 2015 will be a single track conference. Following review and discussion by the Program Committee, the 21 presentations listed below were accepted from among 70 submissions (30% acceptance rate). There will also be lightning talks and Birds-Of-a-Feather sessions, as well as many opportunities to informally talk with other community members.
Day 1, October 3rd
| Time | Presenter | Title | Presentation |
|---|---|---|---|
| 0900 | Brian Gerkey | Opening Remarks | pdf video |
| 0910 | Mark Shuttleworth (Canonical) | Commercial models for the robot generation | pdf video 10.36288/ROSCon2015-900751 |
| 0955 | Stefan Kohlbrecher (Technische Universitaet Darmstadt) | An Introduction to Team ViGIR’s Open Source Software and DRC Post Mortem | pdf video 10.36288/ROSCon2015-900750 |
| 1040 | Everyone | Coffee Break | |
| 1110 | Gary Servin (Creativa77) | ROS android_ndk: What? Why? How? | pdf video 10.36288/ROSCon2015-900749 |
| 1130 | Lorenz Meier (ETH Zurich and PX4), Roman Bapst (ETH Zurich and PX4) | ROS on DroneCode Systems | video 10.36288/ROSCon2015-900748 |
| 1150 | Morgan Quigley (OSRF) | ROS 2 on “small” embedded systems | pdf video 10.36288/ROSCon2015-900747 |
| 1210 | Everyone | Lunch | |
| 1340 | Ruffin White (Institute for Robotics & Intelligent Machines at Georgia Tech) | ROS + Docker: Enabling Repeatable, Reproducible, and Deployable robotic software via Linux Containers | pdf video 10.36288/ROSCon2015-900746 |
| 1400 | Dejan Pangercic (Robert Bosch), Daniel Di Marco (Robert Bosch), Arne Hamann (Robert Bosch) | Docker-based ROS Build Farm | pdf video 10.36288/ROSCon2015-900745 |
| 1420 | Ralph Seulin (CNRS - Univ. Bourgogne Franche-Comte), Raphael Duverne (CNRS - Univ. Bourgogne Franche-Comte), Olivier Morel (CNRS - Univ. Bourgogne Franche-Comte), et al. | ROS for education and applied research: practical experiences | pdf video 10.36288/ROSCon2015-900744 |
| 1440 | Everyone | Lightning Talks I | video |
| 1520 | Everyone | Birds Of a Feather I | |
| 1600 | Everyone | Coffee Break | |
| 1630 | Dirk Thomas (OSRF), Esteve Fernandez (OSRF), William Woodall (OSRF) | State of ROS 2 - demos and the technology behind | pdf video 10.36288/ROSCon2015-900743 |
| 1715 | Jackie Kay (OSRF), Adolfo Rodríguez Tsouroukdissian (PAL Robotics) | Real-time Performance in ROS 2 | pdf video 10.36288/ROSCon2015-900742 |
| 1800 | Everyone | Reception | |
| 2000 | Fin |
Day 2, October 4th
| Time | Presenter | Title | Presentation |
|---|---|---|---|
| 0900 | Dave Coleman (University of Colorado Boulder) | MoveIt! Strengths, Weaknesses, and Developer Insight | pdf video 10.36288/ROSCon2015-900741 |
| 945 | Mirko Bordignon (Fraunhofer IPA), Shaun Edwards (SwRI), Clay Flannigan (SwRI), et al. | Bringing ROS to the factory floor: a status report on the ROS-Industrial initiative | pdf video 10.36288/ROSCon2015-900740 |
| 1030 | Everyone | Coffee Break | |
| 1100 | Kai von Szadkowski (University of Bremen) | Phobos - Robot Model Development on Steroids | pdf video 10.36288/ROSCon2015-900739 |
| 1120 | Shaun Edwards (SwRI), Jorge Nicho (SwRI), Jonathan Meyer (SwRI) | The Descartes Planning Library for Semi-Constrained Cartesian Trajectories | pdf video 10.36288/ROSCon2015-900738 |
| 1140 | Amit Moran (Intel), Gila Kamhi (Intel) | Introducing ROS-RealSense: 3D empowered Robotics Innovation Platform | pdf video 10.36288/ROSCon2015-900737 |
| 1200 | Everyone | Lunch | |
| 1330 | Michael Aeberhard (BMW Group Research and Technology), Thomas Kühbeck (BMW Group Research and Technology), Bernhard Seidl (BMW Group Research and Technology), et al. | Automated Driving with ROS at BMW | pdf video 10.36288/ROSCon2015-900736 |
| 1350 | Jerry Towler (SwRI), Marc Alban (SwRI) | Mapviz: An Extensible 2D Visualization Tool for Automated Vehicle | pdf video 10.36288/ROSCon2015-900735 |
| 1410 | Matt Vollrath (End Point), Wojciech Ziniewicz (End Point) | ROS-driven user applications in idempotent environments | pdf video 10.36288/ROSCon2015-900734 |
| 1430 | Everyone | Lightning Talks II | video |
| 1510 | Everyone | Birds Of a Feather II | |
| 1550 | Everyone | Coffee Break | |
| 1620 | Tom Moore (Clearpath Robotics) | Working with the robot_localization Package | pptx pdf video 10.36288/ROSCon2015-900733 |
| 1640 | Moritz Tenorth (Magazino GmbH), Ulrich Klank (Magazino GmbH), Nikolas Engelhard (Magazino GmbH) | Maru and Toru: Item-specific logistics solutions based on ROS | pdf video 10.36288/ROSCon2015-900732 |
| 1700 | Michael Ferguson (Fetch Robotics) | Accelerating Your Robotics Startup with ROS | video 10.36288/ROSCon2015-900731 |
| 1720 | Ryan Gariepy | Closing Remarks | video |
| 1730 | Fin |
Call For Proposals
Proposal submission deadline: July 7th, 2015
Presentations and tutorials on all topics related to ROS are invited. Examples include introducing attendees to a ROS package or library, exploring how to use tools, manipulating sensor data, and applications for robots.
Proposals will be reviewed by a program committee that will evaluate fit, impact, and balance.
We cannot offer sessions that are not proposed! If there is a topic on which you would like to present, please propose it. If you have an idea for an important topic that you do not want to present yourself, please post it to ros-users@lists.ros.org.
Topic areas
All ROS-related work is invited. Topics of interest include:
- Best practices
- Useful packages and stacks
- Robot-specific development
- ROS Enhancement Proposals (REPs)
- Safety and security
- ROS in embedded systems
- Product development & commercialization
- Research and education
- Enterprise deployment
- Community organization and direction
- Testing, quality, and documentation
- Robotics competitions and collaborations
Proposal submission
A session proposal should include:
- Title
- Recommended duration: Short (~20 minutes) or Long (~45 minutes)
- Summary, 100 word max (to be used in advertising the session)
- Description (for review purposes): outline, goals (what will the audience learn?), pointers to packages to be discussed (500 Words Maximum)
More Info
Organizing Committee
- Tully Foote
- Ryan Gariepy
- Brian Gerkey
- Sebastian Rockel
Past Events
ROSCon has been held annually since 2012. If you’d like to know more we have archives of all the past programs with recordings of the talks and most of the slides. The sites can be found at the locations below.
- ROSCon 2014 Chicago, USA
- ROSCon 2013 Stuttgart, Germany
- ROSCon 2012 St. Paul, USA
Code of Conduct
To ensure a safe environment for for everybody we expect all participants to follow the conference code of conduct.